步进电机型号分类(步进电机的种类)
目前,市场上有几种类型的步进电机,根据其性能和使用目的,它们有多种使用方式。
例如,存在允许精确定位控制的混合动力类型,或希望以低廉的价格使用简单控制系统的PM类型。在性能方面会更好。有影响。其他根据步进电动机的形状和形状进行分类,分为驱动级数和驱动电路分类。步进电动机的转子材料可分为三类。
<1> PM型步进电机:永磁型(永磁型)
<2> VR型步进电机:可变磁阻类型(可变磁阻类型)
<3> HB型混合式步进电机,混合型
?1、PM型
PM型步进电动机的原理结构如图1所示。转子由永磁体组成,并在其周围放置了多个定子。
在图2.2.1中,转子磁铁是一对N和S,并且固定子线圈由四个组成,因为它与步距角直接相关,产生的固定子线圈的数量应为因此,图1中结构的阶梯角为90°。
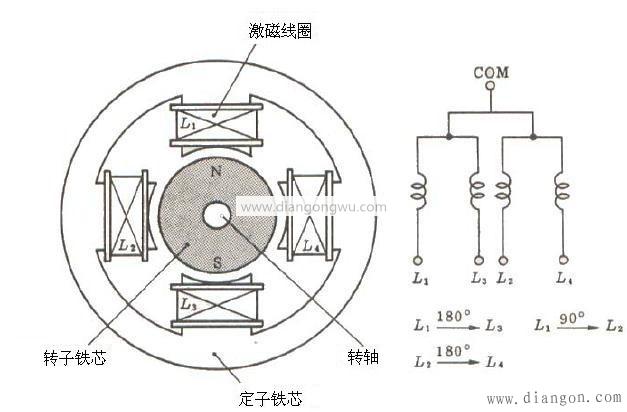
图1 PM型步进电机(两相单极)示意图
另外,PM型的特点是转子由永磁体制成,因此即使没有励磁(当定子线圈未通电时),转矩也必须保持恒定。通过利用这些定性效果,可以构建一个集成的节能系统。
这种步进电机具有多种步进角。 mar钴磁铁的转子使用45°或90°,铁氧体磁铁也可以用于多极。在此图中,最常用的是3.75°,11.25°,15°,18°和22.5°,但是7.5°(48步)。
2、VR型
VR型步进电机的结构如图2所示。由于转子利用了由转子的凸极的力产生的转矩,因此VR型在没有励磁时不会产生保持转矩。
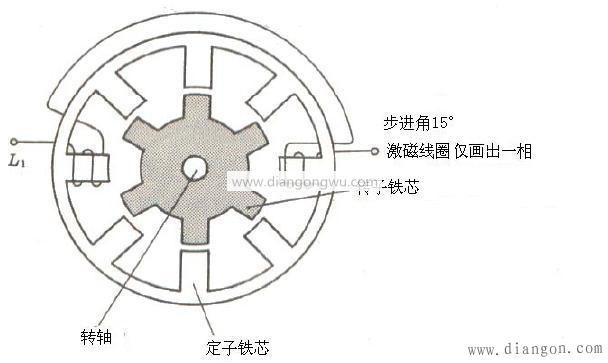
图2 VR步进电机(两相单极)示意图
主要用途适用于扭矩较大的作业机或专用的小型起动机绕线机。其他产品也可用于功率低于1W的超紧凑型电机,简而言之,只有极少数的VR型号,而仅占步进电机总产量的百分之几。
还有15°,7.5°和1.8°的步距角,但最常用的是1.5°步距。
?3、HB混合型
混合式步进电机由定子磁极(锯齿形)和反之亦然的转子磁极组成。近来,转子具有许多齿轮形状。这些是永磁体的组合,其旋转轴沿相同方向磁化。与现有的PM型和VR型相比,其结构更为复杂,基本上可以考虑VR型和PM型的集成结构。
混合类型具有混合类型的含义,因为它是VR类型和PM类型的组合,所以具有这样的名称。
作为一种普通的混合动力类型,由于其高精度,高扭矩,小步距角和几个出色的特性,最初被用于OA关系和其他类别,尤其是用于批量生产。与磁盘存储器关联的磁头的传输。
此外,步距角为0.9°,1.8°和其他3.6°,因此与其他电机相比,步距角非常小。
图3是混合式步进电动机的结构图。它在定子的顶部有八个励磁线圈,最近在端部有几个小齿(齿状突起)。磁极),它们是转子侧的齿轮形磁极以及步进电机的驱动机构。
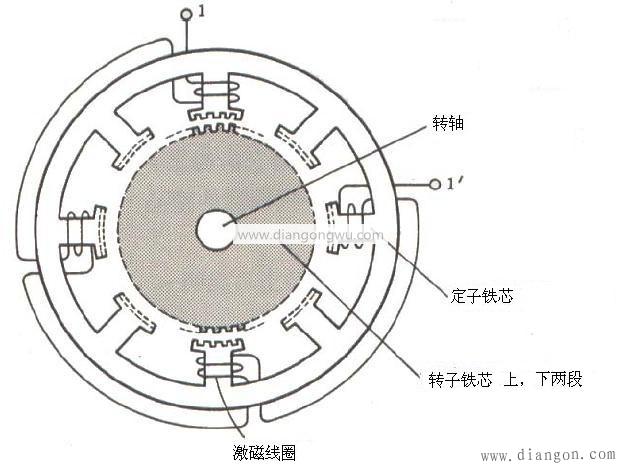
图3混合式步进电动机(两相单极)的结构图