步进电机原理图(步进电动机的结构和工作原理)
发布日期:2021-03-11 09:10 作品声明:内容由AI生成
分享新闻:
1.步进电动机的结构
步进电机的定子和转子铁心是由硅钢片制成的。六个极均匀地分布在定子中,两个极配有线圈,两个极的线圈串联连接,形成三个独立的绕组,称为三相绕组。转子具有4个均匀分布的齿,齿的宽度等于定子主磁性部分的有效宽度,转子没有绕组并且是非磁性的。
2.步进电机的工作原理
当U相绕组通电而V相和W相绕组不通电时,磁通量具有试图采用最小磁阻路径的特性,因此转子齿1的轴线和3是定子,如图所示。它与U极的轴线对齐(转矩为零时的负载)。关闭U相电源并施加V相电源后,转子将逆时针旋转30°,从而使转子齿2和4的轴线与定子V极的轴线对齐,如图所示。 2.当不给V相供电而给W相供电时,转子又旋转30°,以使转子齿1和3的轴线与定子W极的轴线对齐,如图3所示。以此方式,控制绕组以顺序U-V-W-U依次连接和断开,在气隙中产生脉冲旋转磁场,并且转子沿逆时针方向逐步旋转。
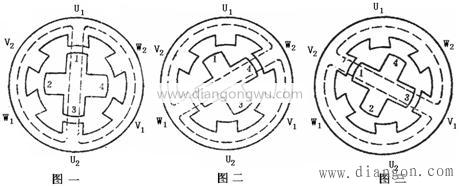
步进电动机的速度取决于定子绕组连接和断开电源的频率,即输入电脉冲的频率。步进电机的旋转取决于顺序。电流在定子绕组轮中流动。当步进电动机的通电顺序更改为U-W-V-U时,电动机将顺时针旋转。定子绕组与电源的连接或断开通常由数字逻辑电路或计算机软件控制。
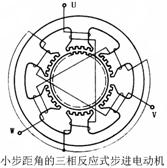
上述简单的三相反应式步进电动机的步进角太大。换句话说,每一步的角度都太大,如控制系统(如高精度CNC机床)中使用的那样。这严重影响了加工工件的精度。这种结构仅在分析原理时使用,实际的步进电动机都是具有小步进角的三相响应式步进电动机。