雷赛步进电机(三相步进电机的转动原理)
长期以来,三相步进电动机一直使用在转子中不使用永磁体的步进电动机(VR型,响应型或可变磁阻型)。 1986年,日本伺服公司开发了一种步进电机,其转子上带有永磁体,定子极上带有齿(磁极齿的设计原理将在后面详细介绍)。这可以通过定子和转子齿距的组合来实现。更高的角度分辨率和扭矩。三相步进电动机的定子线圈的主极数是3的倍数,因此三相步进电动机的定子的主极数是3、6、9、12等。
长期以来,三相步进电动机一直使用在转子中不使用永磁体的步进电动机(VR型,响应型或可变磁阻型)。 1986年,日本伺服公司开发了一种步进电机,其转子上带有永磁体,定子极上带有齿(磁极齿的设计原理将在后面详细介绍)。这可以通过定子和转子齿距的组合来实现。更高的角度分辨率和扭矩。三相步进电动机的定子线圈的主极数是3的倍数,因此三相步进电动机的定子的主极数是3、6、9、12等。
下图比较了具有不同相数的步进电机的典型定子结构和驱动电路,而忽略了转子结构图。假设转子都是PM型或HB型,并且转子配备有两相,三相和五相定子。定子采用最小的主极结构,不会产生不平衡的电磁力(我们将在后面详细说明。转子径向吸引力的总和不会完全彼此抵消,从而产生残余径向力),即2相为4,当主磁极,3个主磁极,3个主磁极为3个磁极,5个主磁极为5相时,该结构会产生不平衡的电磁力,并且上述结构仅用于特殊目的。在图中,定子的结构是最简单的结构,具有2相8极,3相6极和5相10极。
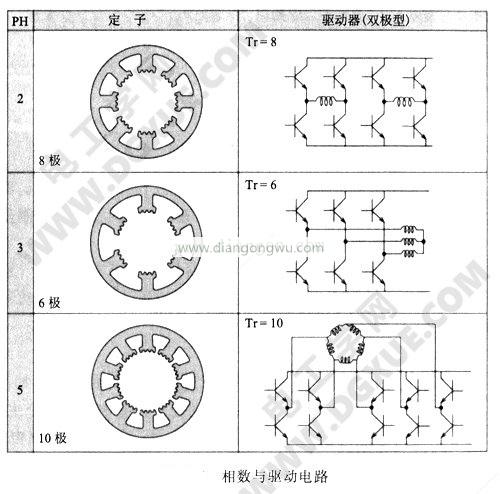
另一方面,对于用于双极线圈的步进电动机驱动电路,功率管的数量对于2相是8,对于5相是10。三相绕组使用Y。在三角形连接中,只有6个功率管足以驱动3个插座,因此考虑到电动机和驱动器的集成,三相步进电动机具有最简单的结构和最低的制造成本。
就定子相的奇数和偶数而言,当奇数时,驱动电路中的开关功率管的数量要小于偶数。例如,用于三相步进电动机的管的驱动功率小于用于两相步进电动机的管的驱动功率。三相驱动器IC现在可在Sanquan Electric Co.Sanyo Electric Co.Ltd.购买。并由新登本工业有限公司等生产公司提供。与两相步进电动机相比,当转子齿数相同时,三相步进电动机具有分辨率高1.5倍且振动少的优点,这增加了使用次数并降低了价格。我希望它可以是一个系列。稍后将详细描述步进电机的性能。
对于三相永磁步进电机,除本课程外,没有系统介绍文档。本课程详细介绍了三相HB步进电机(42mm和60mm)。驱动程序如下所示:如下图所示。
