步进电机实物接线图(单相步进电机的转动原理)
单相步进电动机将一个环形线圈缠绕在线轴上,使它通过正负交流电,并在每次切换电流时沿固定方向移动一级。单相步进电动机只能沿一个方向移动,因为通过转子磁路的透射率(电阻的倒数,表示易于通过)在旋转方向上变大。为了确定旋转方向,磁通量引导使定子磁极比转子宽,定子和转子之间的工作气隙不均匀,旋转方向就是方向。磁阻低。下图显示了单相步进电机的旋转原理。
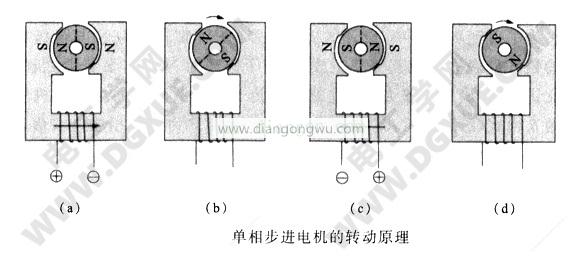
图(a)正电流流过定子绕组,并且定子极产生N和S极。转子的N极和S极被定子极吸引,并停在图中所示的位置。绘画。当定子电流从正变为负时,在切换过程中,电流接近零,并且定子对转子的吸引力接近零。此时,由转子磁通产生的转矩占主导。如图(b)所示,磁通量必须沿着最小气隙的路径移动,因此在磁通量的作用下,转子沿箭头方向移向转子磁极轴(中心线) 。它停在N极和S极的空隙最小的点。如图(c)所示,如果定子绕组为负电流,则定子极的极性反转,并且转子极通过接收定子N和S极的排斥力和重力而运动。直到定子和转子的极轴重合,转子才沿箭头方向移动。当施加到绕组的电流从负变为正时,电流越过零并变为正,转子以180°的步距角通过图(d)到图(a)。重复上述操作,电动机转子可以继续旋转。
在上述单相步进电动机的工作原理中,单相步进电动机的电磁转矩仅在转换定子电流时发生,因此可以看到平均转矩远小于此值。由于脉冲频率也小于100pps,因此其使用受到很大限制,并且只能在响应脉冲频率相对较低的轻负载下运行。示例包括时钟,汽车计时器(引擎计时器),水表计数器等。
下图是另一种单相步进电动机结构的图片,最左边的是完整的电动机,电动机线圈,定子铁心,最后是永磁转子。

单相步进电动机的原理如上图所示。与气隙磁通量变化且仅磁通量变化的结构不同,旋转方向仍由不对称定子磁极确定。该定子是一个极板,其中心有一个直角三角形的孔,并且具有斜线的最高磁导率。当转子磁极面对斜面时,磁通量最大,它是转子的旋转方向,其工作原理与上述示意图相同。
转子是圆柱形永磁体,极数为4,Nr=2,P=1,公式θs=180°/PNr,因此步进角为θs=90°。
定子是由正/负电流驱动的圆形线圈。定子极通过气隙具有与转子相同的极数(4极)。具有简单结构和三角形孔的磁极大约可以视为四个磁极。该马达用于水表流量计等。
下图是另一台单相步进电机的外观图。在照片中可以看到此单相步进电动机,并且定子磁极的尖端沿相同方向倾斜,这改变了转子磁路的磁导率,从而使转子可以沿一个方向旋转。与上图类似(单相步进电动机的外观是一种结构)。与定子相同。

此单相步进电机的转子为永久磁极,周围有30 N极和S极。定子是单相的,磁极总数为30,空气被用作转子导向装置。缠绕在绕线管上的环形线圈通过正负电流,并且步距角θs=12°(Nr=15,P=1)由公式θs=180°/PNr求得,并且沿一个方向移动。由于采用单相绕组,响应速度仅为几十个pps。这种电动机实际上用于建筑机械的时针等。
单相步进电动机的旋转方向由磁导率的偏差确定。其他包括分割定子磁极,嵌入铜短路线圈等,这些在此过程中没有详细介绍。