步进电机控制方式(步进电机开环控制原理)
发布日期:2021-03-11 11:00 作品声明:内容由AI生成
分享新闻:
当直流电流流经步进电机定子的单相绕组时,最接近该相的转子齿被吸引到定子相,并且所产生的电磁转矩大于负载转矩并使转子运动。当转子旋转到电磁扭矩和负载扭矩达到平衡的位置时,转子将固定,并且该电磁扭矩旋转到应放置负载的位置。然后,将励磁电流施加到下一相,最接近该相的其他转子齿被吸引,并且负载被该相的电磁转矩驱动并移动到一个阶梯角以到达下一固定位置。励磁相移的数量和频率决定了转子旋转的最终角度和速度。步进电动机的步进角由定子的相数和转子的齿数确定,这将在下一章中详细介绍。相变数和阶跃角的乘积就是阶跃角(唯一名词是阶跃作用增加的角度),该值确定最终的静止位置。如果步进电机产生的扭矩与负载扭矩相比足够大,则切换命令可以驱动负载进行位置控制。此时,位置平衡力是由步进电动机的静态转矩产生的。
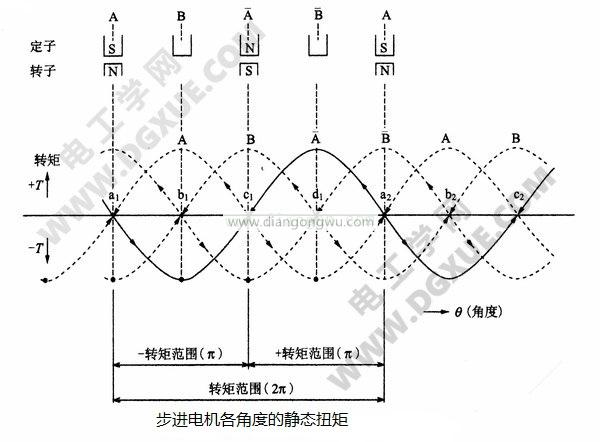
下图显示了2相PM型步进电机的每个相矩角的特性曲线。当“ bar A”相绕组通电时,必须移动带有负载的转子,并且负载必须在转子和A相的力范围内。在图的上部示出了当“条A”上的励磁绕组被通电时定子与转子之间的位置关系。励磁相“条A”的力矩角特性由实线曲线表示,并且当另一相绕组被励磁时,所产生的力矩角特性曲线由虚线表示。
在轻载或空载下,静态扭矩由位置决定,因此“ bar A”相扭矩沿弯曲箭头方向向水平轴和交点C1移动。它实际上在转子转矩负载平衡点停止。
依次激励B相时,转子在b1点处停止,b1-C1之间的角度差为步距角。
变速控制可以使用开环控制(OPEN LOOP)模式,变速仅需更改开关频率命令,这与变频同步电动机的功能相同。