电动机的基本构造和工作原理(电动机的工作原理及组成结构)
电机分类:
静态电机变压器。

DC电机的特点:
DC发生器电位波形良好,对电磁干扰影响不大。
DC电机具有调速范围宽、调速平稳的特点。
DC电机过载能力强,热转矩和制动转矩大。
异步和同步的概念:所谓异步和同步,是指电机转子的转速与气隙中旋转磁场的旋转方向和速度是否相同。如果相同,则称为同步;否则,它们就是异步的。
异步电动机主要用作驱动各种生产机器的电动机。
异步电动机的优点:结构简单,制造容易,价格低廉,运行可靠,坚固耐用,运行效率高,适用的工作特性。
异步电机的缺点:功率因数差。异步电动机运行时,必须从电网吸收反向无功功率,其功率因数始终小于1。
直流电机原理应用:

直流电机的基本工作原理:
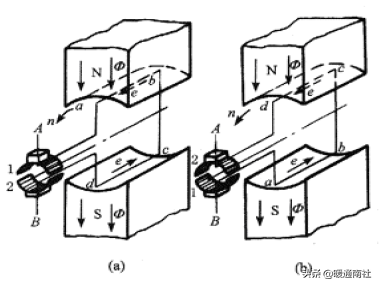
DC电机工作原理图
DC电机工作原理图。当电刷A和B接入电压为U的DC电源时,如果电刷A处于正电位,电刷B处于负电位,则N极范围内导体ab中的电流从A流向B,S极范围内导体cd中的电流从C流向d,载流导体在磁场中受到电磁力,因此ab和cd导体都受到电磁力。根据磁场方向和导体中的电流方向,由电机左手定则判断,ab侧的受力方向为左,而cd侧的受力方向为右。因为磁场是均匀的,导体中流过的电流相同,所以ab侧和cd侧的电磁力大小相等。这样,线圈受到电磁力的作用,逆时针旋转。当线圈转向磁极的中性面时,线圈中的电流等于零,电磁力等于零,但线圈由于惯性继续转动。线圈转半圈后,虽然ab和cd的位置发生了变化,ab侧转到S极,cd侧转到N极,但由于换向器和电刷的作用,cd侧转到N极的电流方向也发生了变化,由D变为C,而S极下ab侧的电流由B流向a,因此,电磁力的方向不变,线圈仍受迫逆时针旋转。可以看出,电流在N极和S极范围内的导体中的方向总是不变的,因此,线圈两侧的受力方向也是不变的,这样线圈就可以按照受力方向保持转动,通过齿轮或皮带的传动可以带动其他的工作机械。
从上面的分析可以看出,要使线圈按一定方向旋转,关键问题是当导体从一个磁极范围转向另一个磁极范围时(即导体通过中性面后),导体中电流的方向也会同时发生变化。换向器电刷就是完成这一任务的装置。在DC电机中,换向器和电刷将输入的DC转换成线圈中的交流电。由此可见,换向器和电刷是DC电机中不可缺少的关键部件。
当然,在实际的DC电机中,并不是只有一个线圈,而是有许多线圈牢牢地嵌在转子铁芯的槽中。当导体通过电流,在磁场中旋转时,带动整个转子旋转。这是DC电机的基本工作原理。
DC电机参数
扭矩:电机能够旋转的扭矩,单位为千克米或牛米.
转矩系数:电动机产生的转矩的比例系数,一般表示每安培电枢电流产生的转矩。
扭矩:由电刷、轴承、换向装置等的摩擦引起的扭矩损失。
启动转矩:电机启动时产生的旋转转矩。
转速:电机的转速。工程单位为r/min,即每分钟的转数。在国际单位制中,是弧度/秒,即弧度每秒。
电枢电阻:电枢内部的电阻,通常包括有刷电机中电刷和换向器之间的接触电阻。因为当电流流过时电阻会变热,所以总是希望电枢电阻尽可能小
电常数:电枢电流从零达到稳定值的63.2%所经过的时间。测量电气时间常数时,电机应处于锁定状态,并施加步进驱动电压。在工程中,常利用电枢绕组的电阻Ra和电感La来计算电常数:Te=LA/RA。
机械时间常数:从电机启动到速度达到空载速度的63.2%所经过的时间。测量机械时间常数时,电机应处于空载运行状态,并施加阶跃性质的阶跃电压。在机械时间常数工程中,TM=(j Ra)/(ke Kt)往往是利用电机转子的转动惯量J和电枢电阻Ra,电机的反电动势系数ke和转矩系数Kt来计算的。
惯性矩:质量物体保持其固有运动状态的一种特性。
反电动势系数:电机旋转时,电枢绕组内部切割磁力线感应出的电动势相对于转速的比例系数,也称为发电系数或感应电动势系数。
功率密度:单位质量的电机输出功率。功率密度越高,电机的有效材料利用率越高。
转子:转子;定子:定子;电枢:电枢;激发:激发。
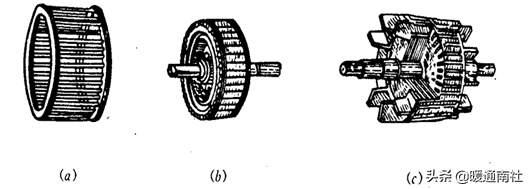
三相异步电动机的结构:

三相鼠笼式异步电动机外形图
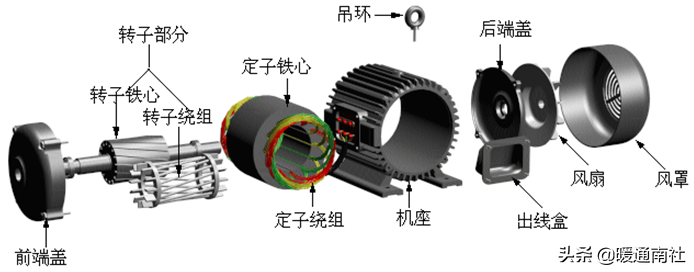
主要部件的分解图
定子用于产生旋转磁场。三相电机的定子一般由外壳、定子铁芯和定子绕组组成。
(1)外壳:三相电机的外壳包括底座、端盖、轴承盖、接线盒、吊环等部件。
机座:铸铁或铸钢用于保护和固定三相电机的定子绕组。中小型三相电机的底座也有两个支撑转子的端盖,是三相电机机械结构的重要组成部分。通常底座的外观要求散热性能好,所以一般都铸有翅片。
端盖:用铸铁或铸钢铸造。它的作用是将转子固定在定子腔的中心,使转子在定子中均匀转动。
轴承盖:也是铸铁或铸钢,其作用是固定转子,使其不能轴向移动,也可以储存润滑油,保护轴承。
接线盒:通常用铸铁铸造,其作用是保护和固定绕组的引出端子。
吊环:通常由铸钢制成,安装在底座的上端,用于提升和吊起三相电机。
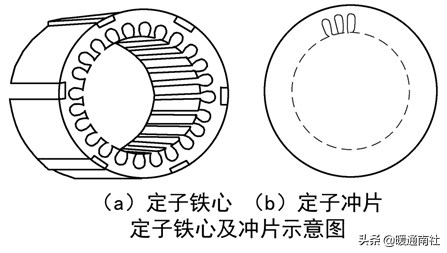
(2)定子铁芯
异步电机的定子铁芯是电机磁路的一部分。由0.35mm~0.5mm厚的薄硅钢片涂绝缘漆制成,如下图所示。由于硅钢片很薄,而且片与片之间绝缘,所以由交变磁通引起的铁芯涡流损耗减小。铁芯的内圆有均匀分布的槽口,用于嵌入定子绕组。
(3)定子绕组
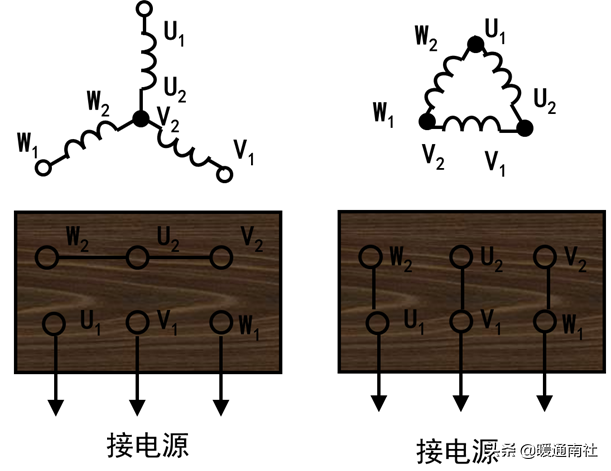
定子是三相电机的电路部分。三相电机有三相绕组,当施加三相对称电流时,会产生旋转磁场。三相绕组由三个独立的绕组组成,每个绕组由几个线圈连接而成。每个绕组是一相,每个绕组在空间上相差120电角度。线圈由绝缘铜线或绝缘铝线缠绕而成。中小型三相电机多采用圆形漆包线,而大中型三相电机的定子线圈则是用绝缘的较大截面的扁铜线或扁铝线绕制,然后按照一定的规律嵌入定子铁芯槽中。三相定子绕组的六个出线端子均引至接线盒,首端标为U1、V1、W1、W1,末端标为U2、V2、W2。这六个出线端子在接线盒中的排列如下图所示,它们可以连接成星形或三角形。

(a)星形连接;三角形连接
定子绕组的连接
定子绕组:它是电路的重要组成部分。定子绕组由绝缘铜(或铝)线制成,嵌在定子槽中。

异步电动机的转子由转子铁心、转子绕组和转轴组成。
1.转子铁芯:是电机磁路的一部分,由0.5毫米厚的硅钢片叠压而成
笼型转子:笼型绕组是一种自身短路的绕组。在转子的每个槽中放一根导线,用端环将铁芯的两端连接起来,形成短路绕组。如果去掉转子铁芯,可以看到剩下的绕组形状像鼠笼,所以也叫鼠笼转子。导体的材料可以是铜或铝。
如果使用铜,需要将预先制作好的裸铜排插入转子铁芯上的槽内,然后将铜端环缠绕在两端延伸的铜排上,最后焊接在一起,如图(B)所示。如果使用铸铝,则与端环和风扇一起一次性铸造,如图(C)所示。笼型转子结构简单,制造容易,经济耐用,因此应用广泛。
其他部件包括端盖、风扇等。除了端盖的保护功能之外,端盖还设置有支撑转子轴的轴承。风扇用于通风和冷却电机。三相异步电动机的定子和转子之间的气隙一般只有0.2 mm ~ 1.5 mm,气隙过大会使电动机的功率因数下降;气隙过小,装配困难,运行不可靠,高次谐波磁场增强,增加附加损耗,启动性能变差。
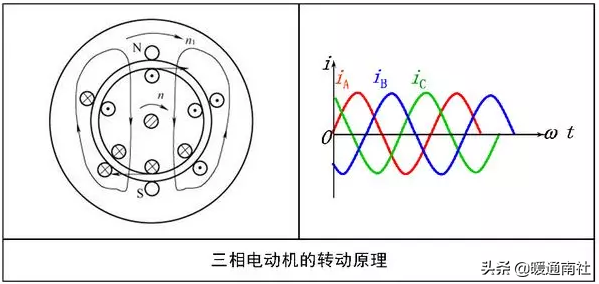
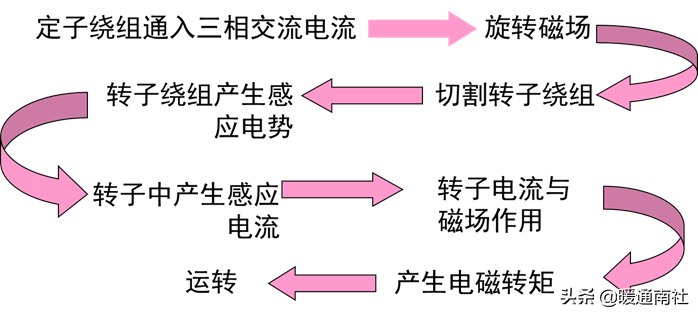
异步电机的工作原理:
三相交流电通过定子绕组后,形成旋转磁场,其速度为:

旋转磁场的磁力线被转子导体切割。根据电磁感应原理,转子导体产生感应电动势。当转子绕组闭合时,电流流过转子导体。让旋转磁场顺时针旋转,在某一时刻,上部为北极N,下部为南极S,如下图所示。根据右手定则,上转子导体中电动势和电流的方向是由内向外,用表示;在下半部分,是从外到内,由.表示
原理:定子旋转磁场以n0转速切割转子导体感应电动势(发电机右手法则),转子导体内形成电流,使导体受到电磁力形成电磁转矩,推动转子以N转速向n0方向旋转(电机左手法则),从轴输出一定量的机械功率。(n不能等于n0)。
特点:电机中必须有一个在n0旋转的磁场。
——实现能量转换的前提;电动运行(异步)时,n常数不等于n0。
-必要条件nn0;产生转矩的电流是由感应产生的。
-感测名称的来源。
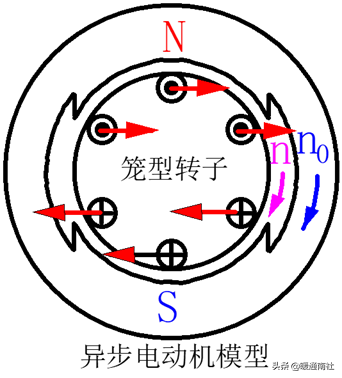
过流转子导体在磁场中受到电磁力,力F的方向可以用左手定则确定,如上图所示。电磁力作用在转子导体上,在转轴上形成电磁转矩,使转子沿旋转磁场方向旋转,转速为n。
三相电机的转子速度N永远不会加速到旋转磁场的速度n1。只有这样,转子绕组和旋转磁场之间才会有相对运动来切割磁力线,转子绕组导体中就会产生感应电动势和电流,从而产生电磁转矩,使转子继续向旋转磁场方向旋转。由此可见


而且是异步电机工作的必要条件,故名“异步”。
异步电机旋转磁场的产生:
异步电动机的旋转磁场;
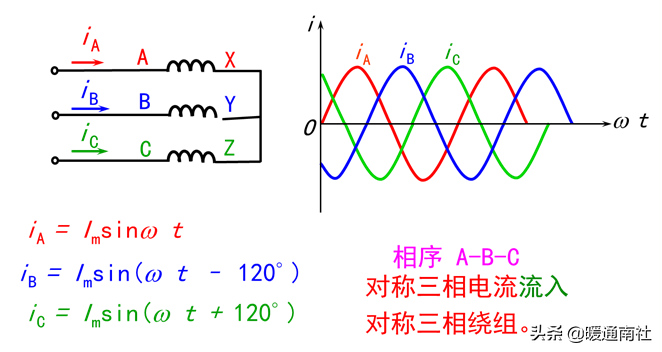
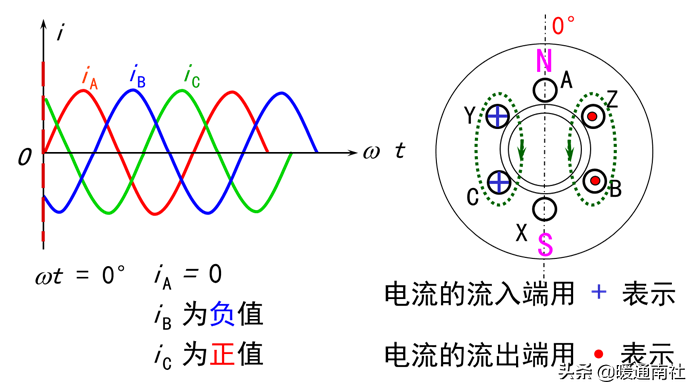
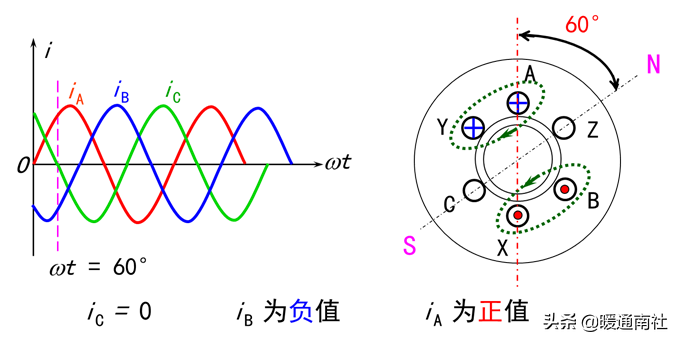
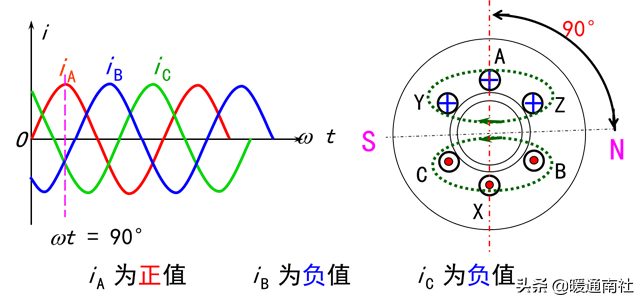
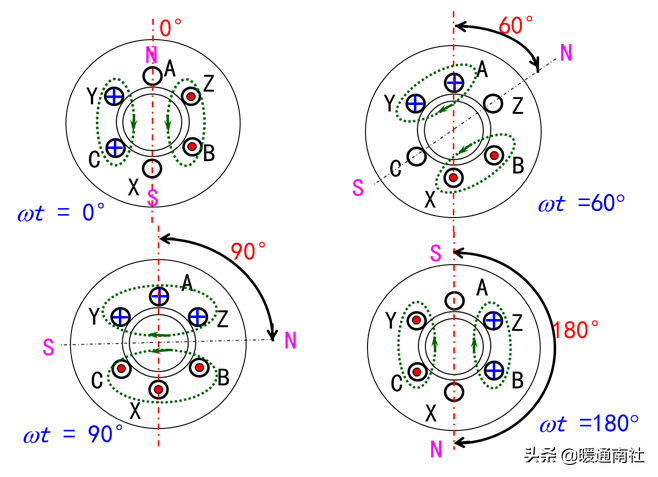
当空间差为120度的三相绕组通上对称的三相电流时,就会产生一对磁极的旋转磁场。电流变化一个周期,磁场也顺时针旋转一周(空间旋转角度360度)。
改变旋转磁场的方向:
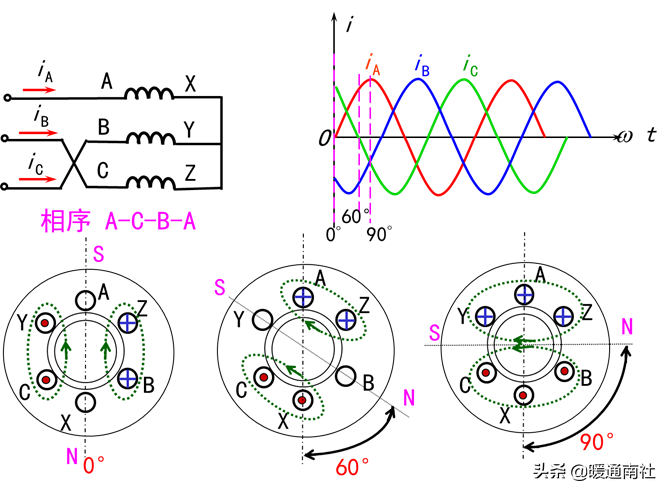
综上所述,可以得出结论:改变流入三相绕组电流的相序,可以改变旋转磁场的方向;改变旋转磁场的方向会改变三相异步电动机的旋转方向。
010-5
用单片机控制DC电机时,需要增加一个驱动电路。驱动电路应为DC电机提供足够的驱动电流,不同的DC电机会有不同的驱动电流。要根据实际需要选择合适的驱动电路,通常有以下几种驱动电路:三极管电流放大驱动电路、电机专用驱动模块(如L298)、达林顿驱动器等。如果是驱动单个电机,电机的驱动电流不大,可以用三极管自己搭建驱动电路,不过这样麻烦一点。如果电机所需驱动电流较大,可以直接选用市场上现成的电机专用驱动模块。该模块接口简单,操作方便,能为电机提供较大的驱动电流,但其价格较贵。如果你是自学电机原理和电路驱动原理,建议你可以选择第三种方案,用达林顿驱动器,其实就是集成芯片。一个单片机可以同时驱动八个电机,每个电机由单片机的一个I/O口控制。当需要调节DC电机的速度时,单片机相应的I/O口会输出不同占空比的PWM波形。在下面的程序中,我们将介绍驱动电路。在此之前,先介绍一下PWM波。
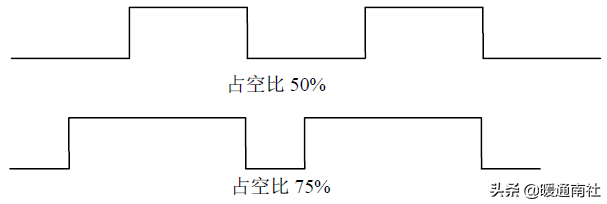
PWM波:PWM是英文Pulse Width Modulation的缩写,是一种按照一定的规则改变脉冲序列的脉冲宽度来调整输出和波形的调制方式。在我们的控制系统中最常用的是矩形波PWM信号,在控制过程中需要调整PWM波的占空比。如图所示,占空比是指一个周期时间内高电平持续时间的百分比。控制电机速度时,占空比越大,速度越快。如果所有电机都处于高电平,即占空比为100%时,速度会达到最快。
利用单片机I/O口输出PWM信号时,有三种方法:
(1)软件延迟可以用来在高电平延迟时间到的时候将I/O口电平反相为低电平,然后再次延迟,在低电平延迟时间到的时候将I/O口电平反相,这样就可以通过这个周期得到PWM信号;
(2)使用定时器,控制方法同上,但这里使用单片机的定时器定时翻转高低电平,没有软件延时;
(3)利用单片机的PWM控制器,STC12系列单片机有自己的PWM控制器,STC89系列单片机没有这个功能,很多其他类型的单片机也有PWM控制器,比如PIC单片机,AVR单片机。
直流电机的驱动:
图8是使用TX-1C实验板进行DC电机扩展实验时的硬件连接图。电机扩展板独立于TX-1C实验板,电机扩展板上使用5V DC电源。做这个实验的时候,两个电源需要共用地。达林顿逆变器ULN2803用于驱动扩展板上的电机。这里,只驱动一个电机。电机一端接5V电源,另一端接ULN2803的OUT6引脚。ULN2803的IN6引脚与单片机的P1.7相连。通过控制单片机P1.7输出PWM信号,可以控制DC电机的转速和启停。

DC电机与单片机连接示意图

实验用DC电机的物理图
DC电机参数,电压2-6V,直径24mm,高度12mm。
直流电机与单片机的硬件连接
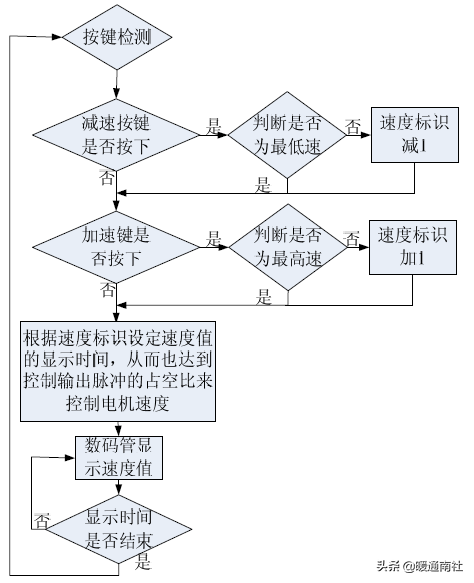
C语言程序实例:
要正确使用电机,必须看懂铭牌。以Y132M-4电机为例,说明铭牌上各数据的意义。
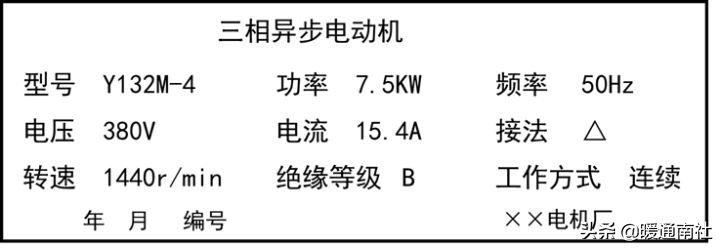
此外,功率因数为0.85,效率为87%。
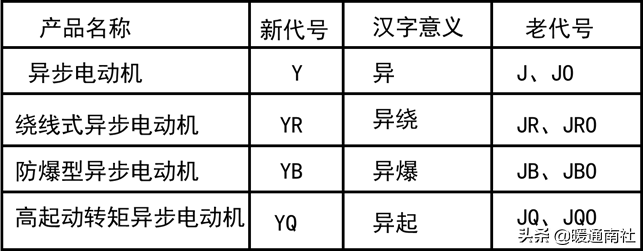
为了满足不同用途和不同工作环境的需要,电机被制成不同的系列,每个系列由各种型号代表。
型号描述:

电机铭牌数据-型号:
电机铭牌数据-连接方法:
电压:铭牌上标注的电压值是指额定运行时应施加在电机定子绕组上的线电压。
电流:铭牌上标注的电流值是指电机以额定速度运行时定子绕组的线电流。
电源安
功率因数:由于电机是感性负载,定子相电流滞后相电压一个角。cos功率因数。
转速:由于生产机械对转速的要求不同,需要生产不同磁极的异步电机,所以有不同的转速等级。最常用的是四极电机(n0=1500r转/分)。
绝缘等级:绝缘等级根据使用中的电机绕组所用绝缘材料的允许极限温度进行分级。所谓极限温度,是指电机绝缘结构中最热点的最高允许温度。

防护等级:防护等级表示三相电机外壳的防护等级,其中IP是防护等级的符号,后面两位数字分别表示电机的抗固体和防水能力。数量越大,防护能力越强。例如,IP44中的第一个数字“4”表示电机可以防止直径或厚度大于1mm的固体进入电机内壳。第二个数字“4”表示可以承受任何方向的飞溅。
本文来自网络,由暖通南社编辑。