步进驱动器工作原理(步进驱动器的结构及工作原理图解)
1.步进电机控制系统如图所示。
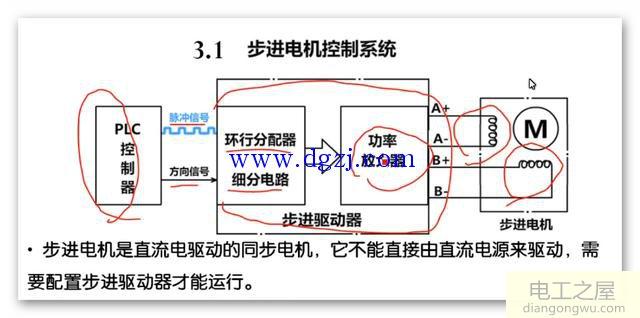
左侧的PLC控制器向我们的步进驱动器提供脉冲信号,脉冲数,脉冲的频率和方向信号。步进驱动器输入后,将由环形除法器和细分进行处理。放大器会放大信号,如在介绍PLC时提到的那样,PLC输出的脉冲信号相对较小,因此在驱动步进电机之前必须先由步进驱动器将其放大。不能通过直接连接到直流电源(例如24V,48V)来驱动该步进电机。不允许。我将向您展示分解后的对象,如图2所示。

内部电路板,左为低功率,右为高功率,智能。我有一个CPU,因为我需要一个编码器来进行闭环控制。脉冲连接这是来自编码器的信号。看一下形状。这是因为市场上许多设备的形状相似且容易混淆,因此您需要弄清楚它,如图3所示。

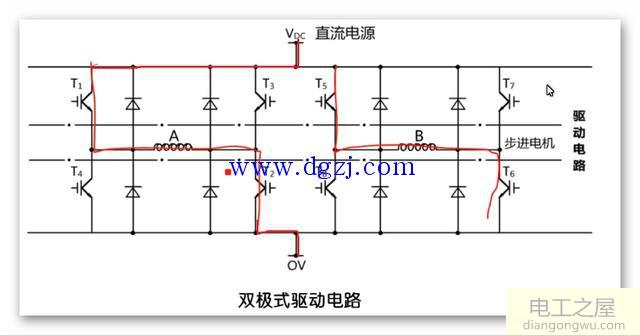
该图是功率放大器的工作原理图,对于该伺服步进驱动器,T1导通,T2执行IGBT。现在有更多的IGBT。直流电源DC流经T1,通过A线圈流至T2,并流至0V。这是给定的直流电。立即产生磁场。拉动转子使其旋转一定角度并为A线圈通电后,我们将在下一步为B线圈供电。但是,有许多步进电机与A和B线圈同时供电。进行细分时,它提供的电流是不同的。 A线圈中的电流为4单位,B线圈中的电流为0单位如果从A线圈中的电流减去3单位,B线圈中的电流为1单位。这意味着我要同时供电。用这个。步进驱动器控制该电流的大小以达到步进的目的,在A线圈通电后,B线圈通电并反向通电。完成,如下图,图5所示。
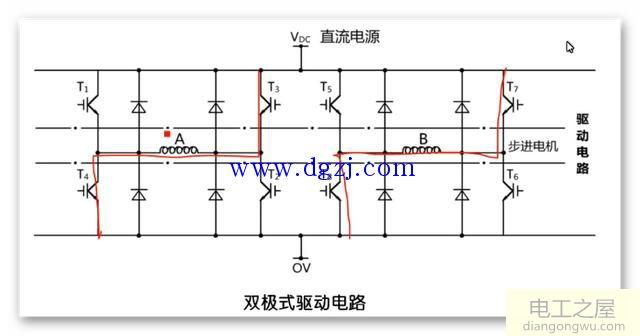
这是反向通电。当没有分段时,将完成此操作。让我们看一下下图,如图6所示。
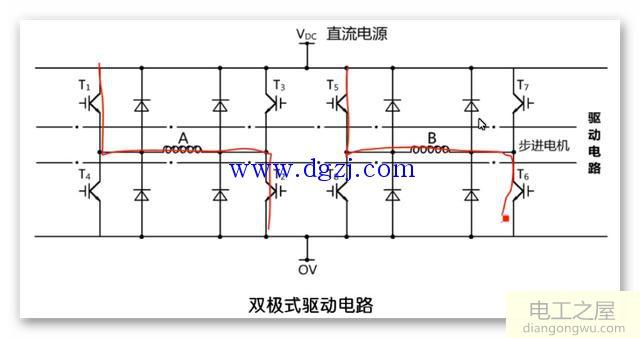
分割后,向线圈A供电,在供电后向线圈B供电。由于当前速率不同,因此已经达到了分割的目的。它是独立完成的,因此您不必担心,但是您需要使用细分开关来设置细分。设定后,A线圈先加电还是B线圈先加电都没关系。注意功率百分比。当自动形成时,每个人都只需要关心脉冲的频率和数量。使用PLC设置参数位置时,需要设置这些参数。后续工作由步进驱动程序自动完成,但是您需要了解其原理。