伺服电机驱动器原理图(伺服驱动器工作原理和控制方式)
伺服驱动器全部使用数字信号处理器(DSP)作为控制核心,可以实现更复杂的控制算法,并实现数字化,联网和智能化。功率设备通常使用以智能功率模块(IPM)为核心的驱动电路。驱动电路集成在IPM中,并具有故障检测和保护电路,例如过电压,过电流,过温度和欠电压。除了主回路软启动电路之外,它还减少了启动过程对驱动器的影响。
首先,功率驱动单元通过三相全桥整流电路对输入的三相功率或主功率进行整流,以获得相应的直流电。三相交流或市电经过整流后,通过三相正弦波PWM电压变频器变频驱动交流伺服电机。功率驱动单元的整个过程可以简称为AC-DC-AC过程。整流器单元(AC-DC)的主要拓扑电路是三相全桥非受控整流器电路。
通用伺服器有三种控制模式:位置控制模式,转矩控制模式和速度控制模式。
1.位置控制:在位置控制模式下,旋转速度通常由从外部输入的脉冲频率决定,旋转角度由脉冲数决定。一些伺服器可以直接控制速度和位移。对于分配,位置模式通常在定位设备中使用,因为它可以非常严格地控制速度和位置。
2.转矩控制:转矩控制方法通过外部模拟量输入或直接地址分配来设置电动机轴的外部输出转矩,并且可以通过立即更改模拟量设置来进行更改。您也可以通过通讯更改地址值来更改设置扭矩。
此应用程序主要用于对材料有严格要求的卷绕和退绕设备,例如卷绕设备或拉纤设备。必须根据绕组半径的变化随时更改转矩设置。随着材料缠绕半径的变化,作用力不变。
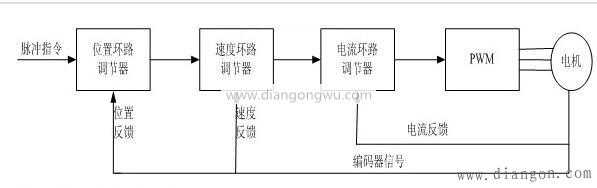
3.速度模式:旋转速度可以通过模拟输入或脉冲频率进行控制。速度模式具有外环PID控制作为上级控制单元,但在提供位置信号时也可用于定位。或者,为了进行计算,直接负载的位置信号必须反馈到较高位置。位置模式还支持直接负载外环检测位置信号。此时,位于电动机轴末端的编码器仅检测电动机速度,并且位置信号由检测设备直接在最终负载的末端提供。减少中间传输过程错误的好处提高了整个系统的定位精度。
如果对电动机的速度和位置没有要求,则只要输出恒定转矩,就使用转矩模式。
如果您对位置和速度有特定的精度要求,但是您对实时扭矩不太在意,则使用扭矩模式不方便,最好使用速度或位置模式。
如果上位控制器的闭环控制功能良好,则速度控制效果将良好。如果您的要求不是很高或默认情况下没有实时要求,请使用位置控制方法。